計(jì)算機(jī)信息系統(tǒng)集成服務(wù)作為現(xiàn)代信息技術(shù)領(lǐng)域的核心組成部分,在推動(dòng)產(chǎn)業(yè)升級(jí)、優(yōu)化業(yè)務(wù)流程和提升管理效率方面發(fā)揮著至關(guān)重要的作用。工業(yè)和信息化部作為我國(guó)工業(yè)和信息產(chǎn)業(yè)的主管部門(mén),對(duì)該行業(yè)的監(jiān)管和引導(dǎo)尤為重視。
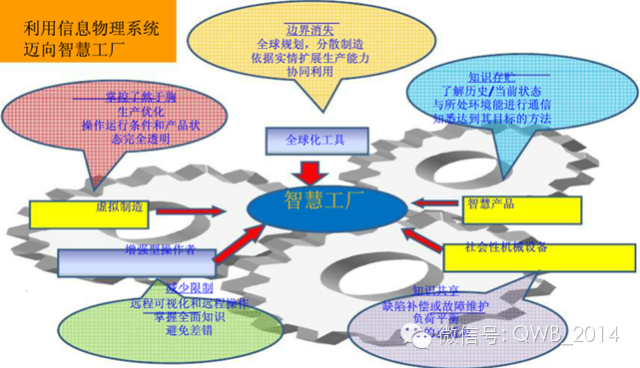
信息系統(tǒng)集成服務(wù)指的是將硬件、軟件、網(wǎng)絡(luò)通信及信息技術(shù)服務(wù)等有機(jī)結(jié)合,為用戶提供一體化的解決方案。隨著“數(shù)字中國(guó)”建設(shè)的深入推進(jìn),集成服務(wù)已廣泛滲透到政務(wù)、金融、制造、交通、醫(yī)療等各個(gè)關(guān)鍵領(lǐng)域,成為支撐社會(huì)經(jīng)濟(jì)數(shù)字化轉(zhuǎn)型的基礎(chǔ)性力量。
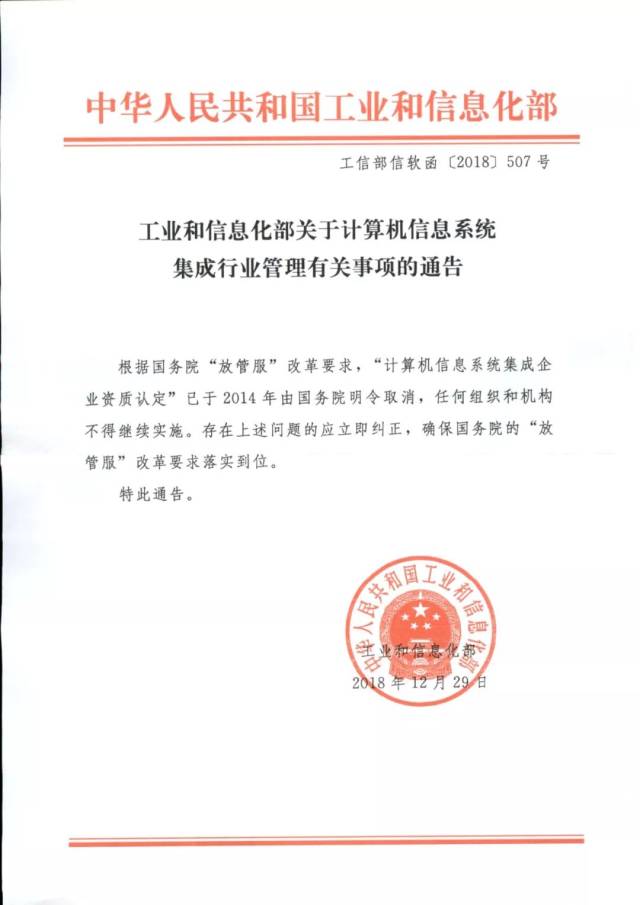
工業(yè)和信息化部通過(guò)制定行業(yè)標(biāo)準(zhǔn)、實(shí)施資質(zhì)管理、推動(dòng)技術(shù)創(chuàng)新等多方面舉措,致力于規(guī)范和促進(jìn)行業(yè)健康發(fā)展。例如,通過(guò)完善資質(zhì)認(rèn)證體系,確保服務(wù)提供商具備相應(yīng)的技術(shù)實(shí)力和項(xiàng)目管理能力;通過(guò)倡導(dǎo)國(guó)產(chǎn)軟硬件的集成應(yīng)用,增強(qiáng)產(chǎn)業(yè)鏈供應(yīng)鏈的安全可控性;鼓勵(lì)企業(yè)加強(qiáng)研發(fā)投入,在云計(jì)算、大數(shù)據(jù)、人工智能等新興技術(shù)融合集成方面實(shí)現(xiàn)突破。
當(dāng)前,行業(yè)正呈現(xiàn)出服務(wù)化、平臺(tái)化、智能化的新趨勢(shì)。用戶需求從單一的產(chǎn)品采購(gòu)轉(zhuǎn)向全生命周期的服務(wù)運(yùn)營(yíng),這對(duì)集成商提出了更高的要求——不僅需要深厚的技術(shù)整合能力,還需具備持續(xù)的運(yùn)維服務(wù)和業(yè)務(wù)洞察力。工信部的相關(guān)政策也相應(yīng)強(qiáng)調(diào),要引導(dǎo)企業(yè)提升服務(wù)質(zhì)量和創(chuàng)新能力,培育具有國(guó)際競(jìng)爭(zhēng)力的龍頭企業(yè)。
在工業(yè)和信息化部的持續(xù)引導(dǎo)與市場(chǎng)內(nèi)在驅(qū)動(dòng)下,計(jì)算機(jī)信息系統(tǒng)集成服務(wù)將繼續(xù)向更高水平發(fā)展。行業(yè)應(yīng)緊抓新基建、信創(chuàng)產(chǎn)業(yè)發(fā)展等戰(zhàn)略機(jī)遇,強(qiáng)化標(biāo)準(zhǔn)建設(shè)與人才培育,為構(gòu)建自主可控、安全高效的現(xiàn)代信息技術(shù)產(chǎn)業(yè)體系貢獻(xiàn)力量。